PCG Animation
Unity C#Repo Link
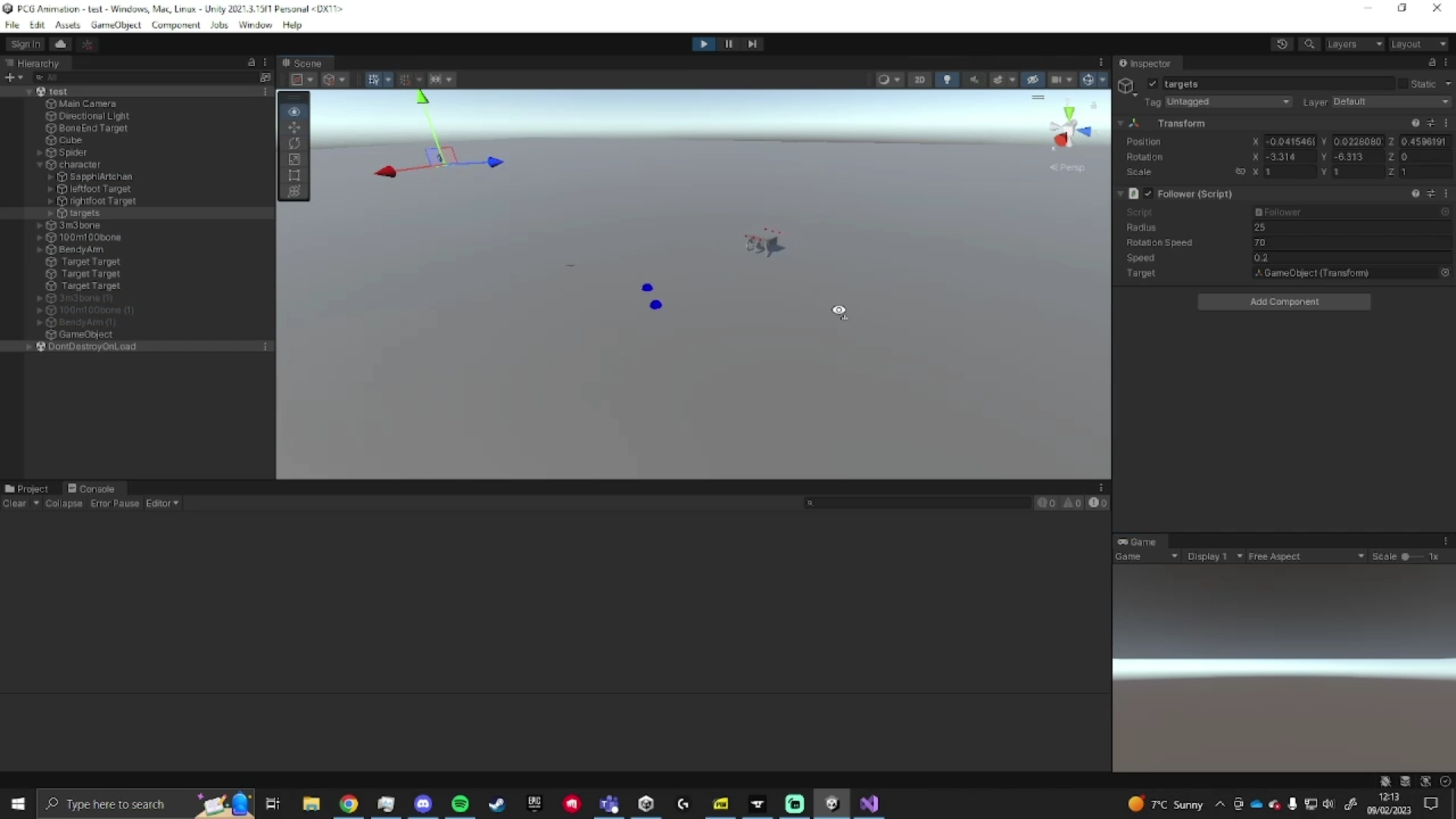
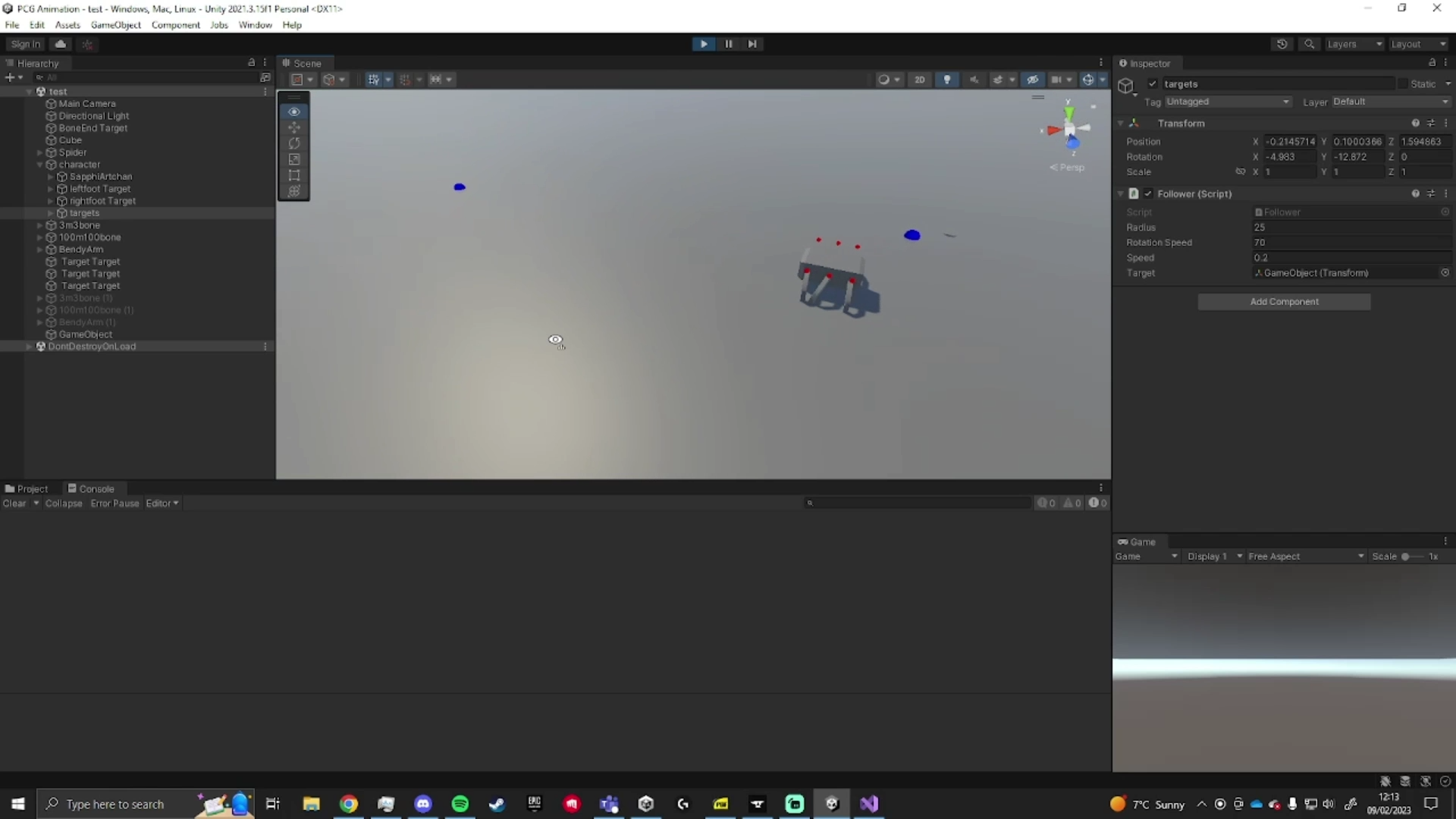
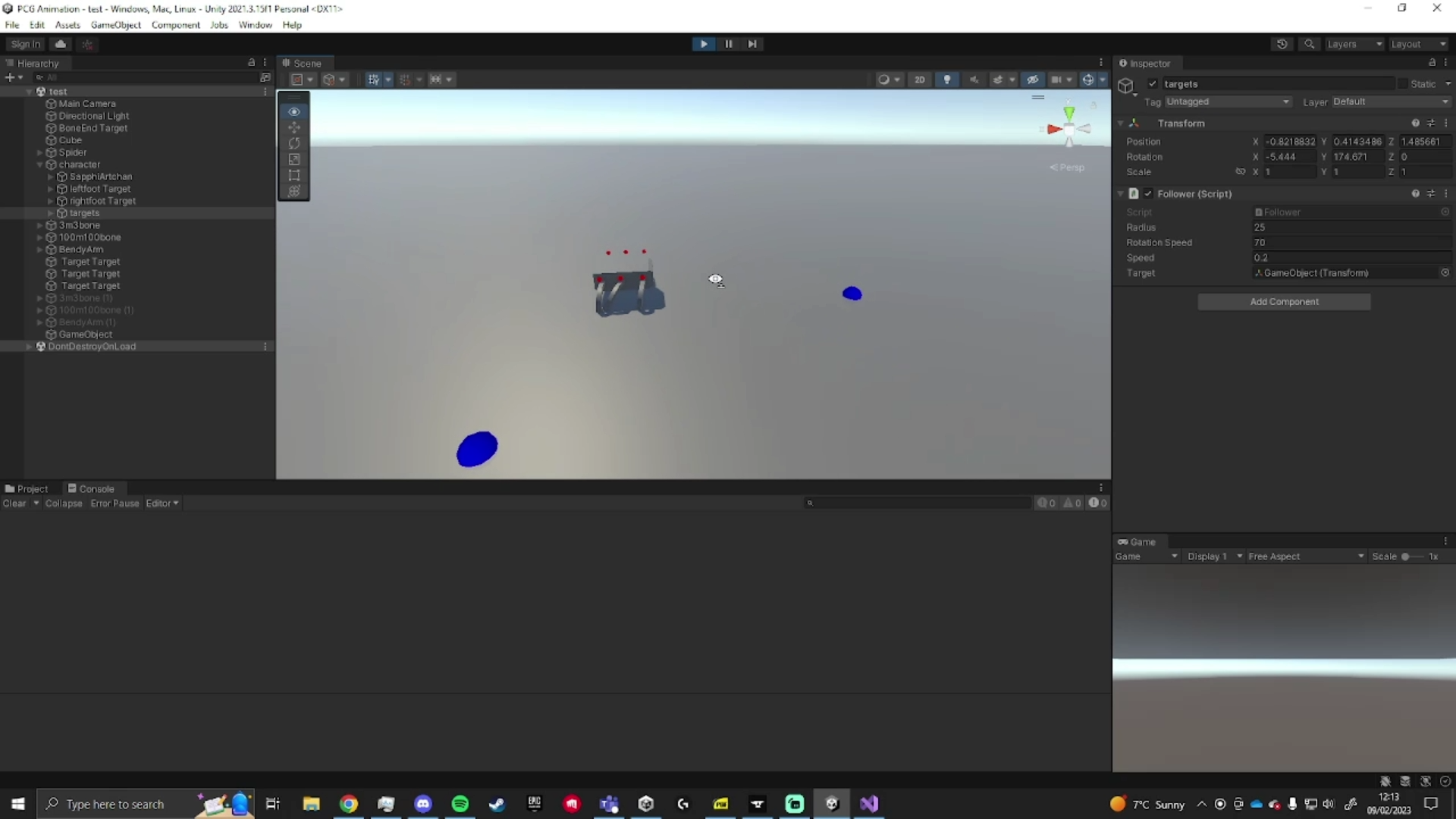
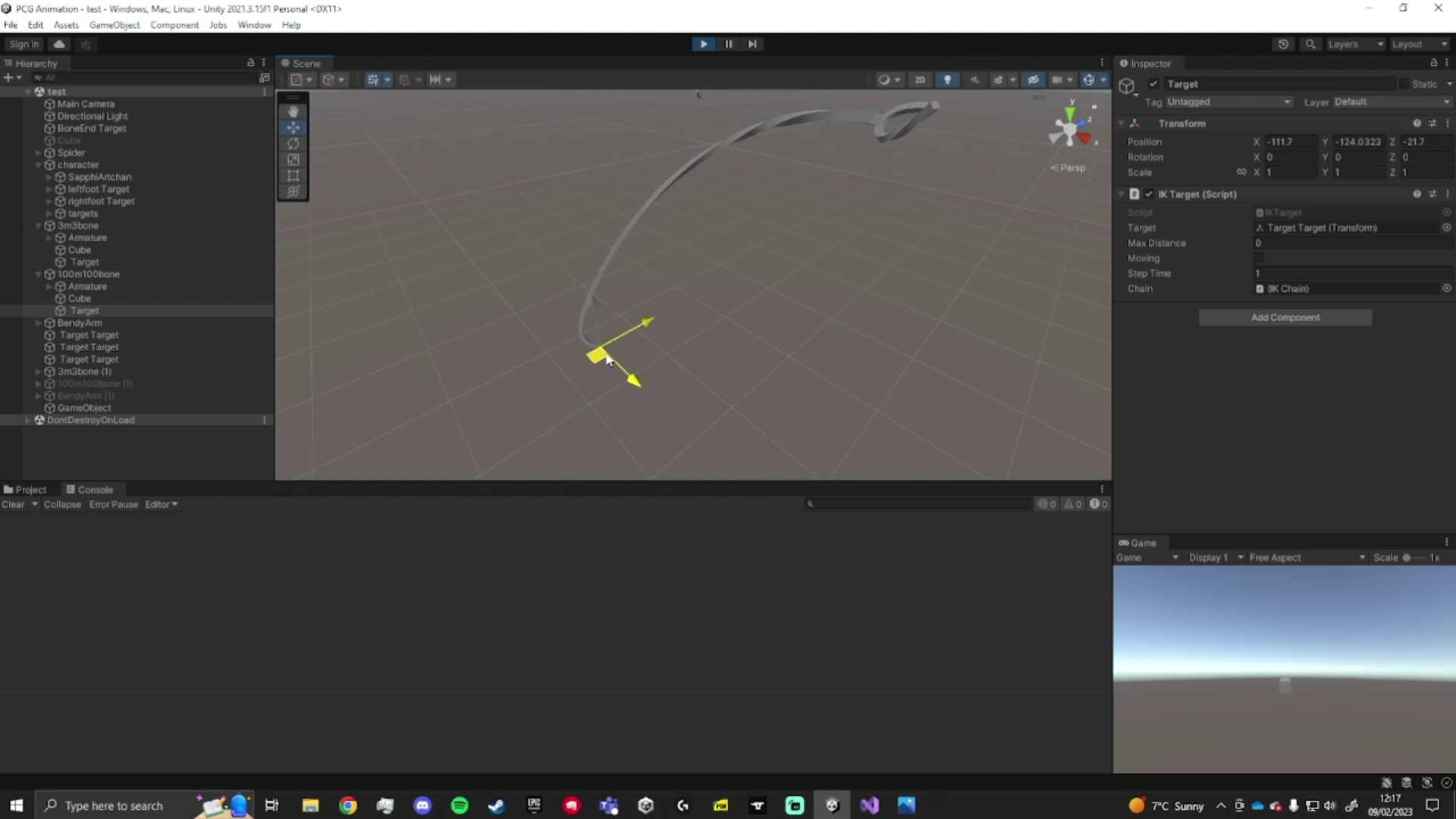
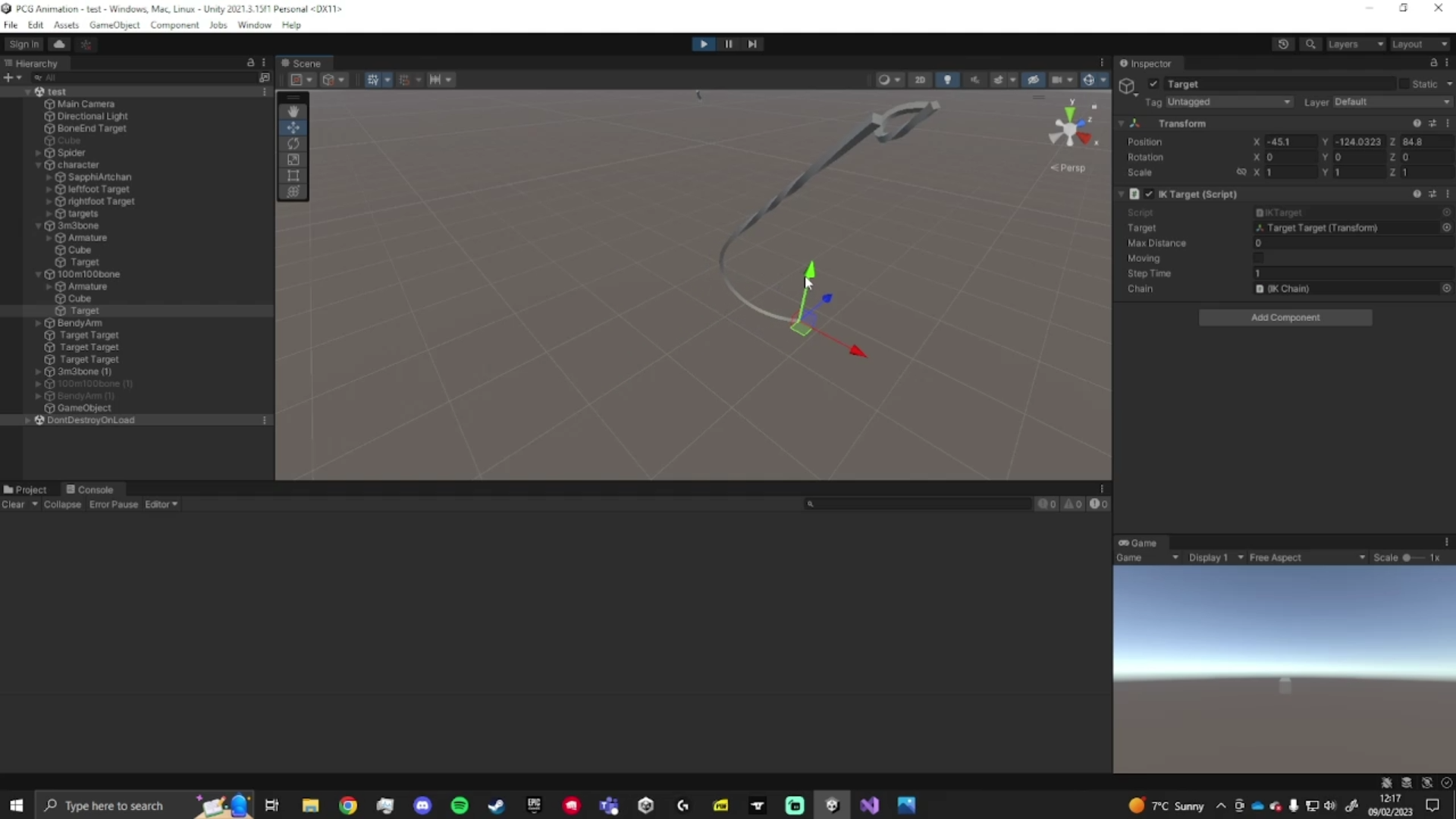
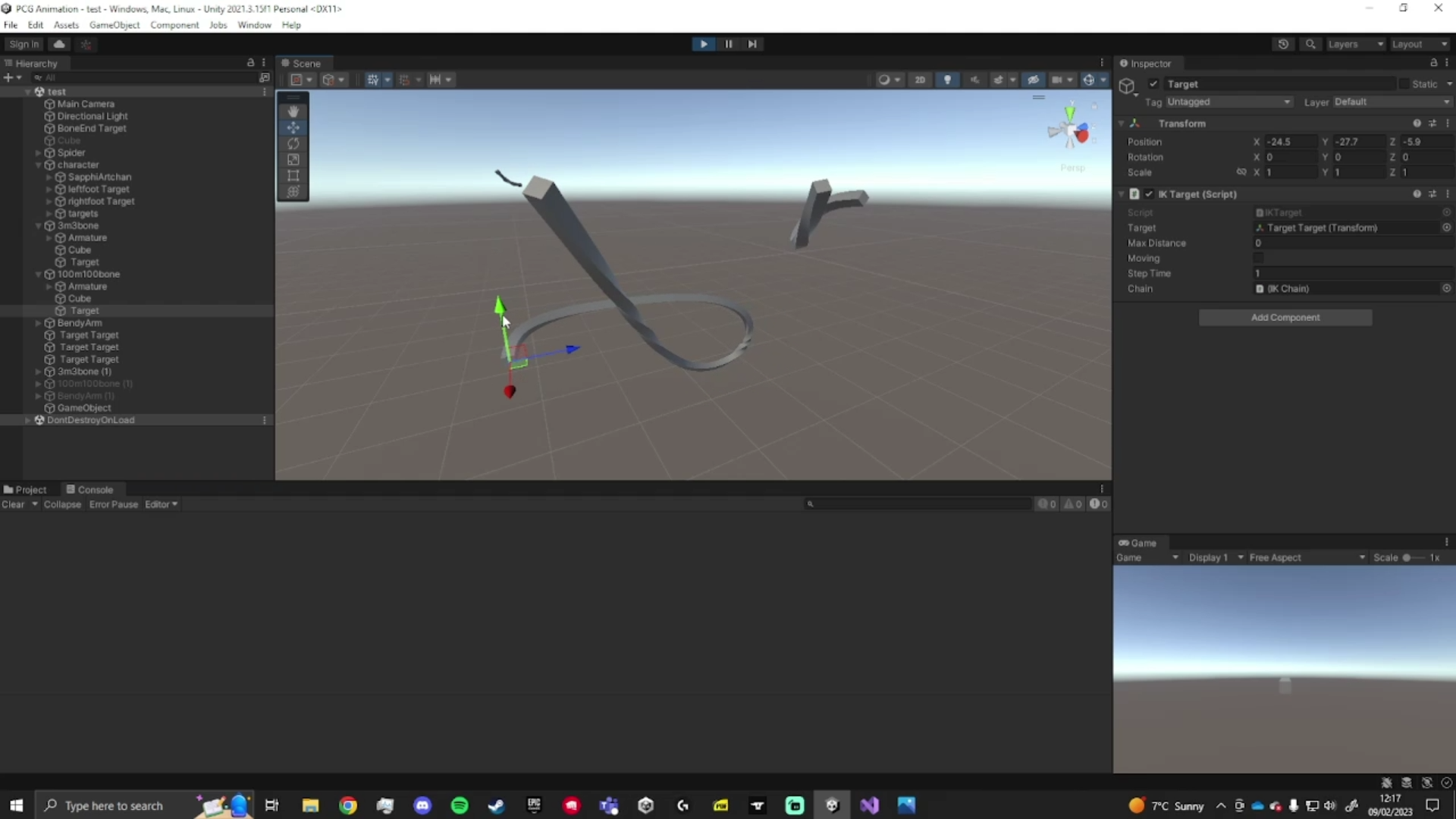
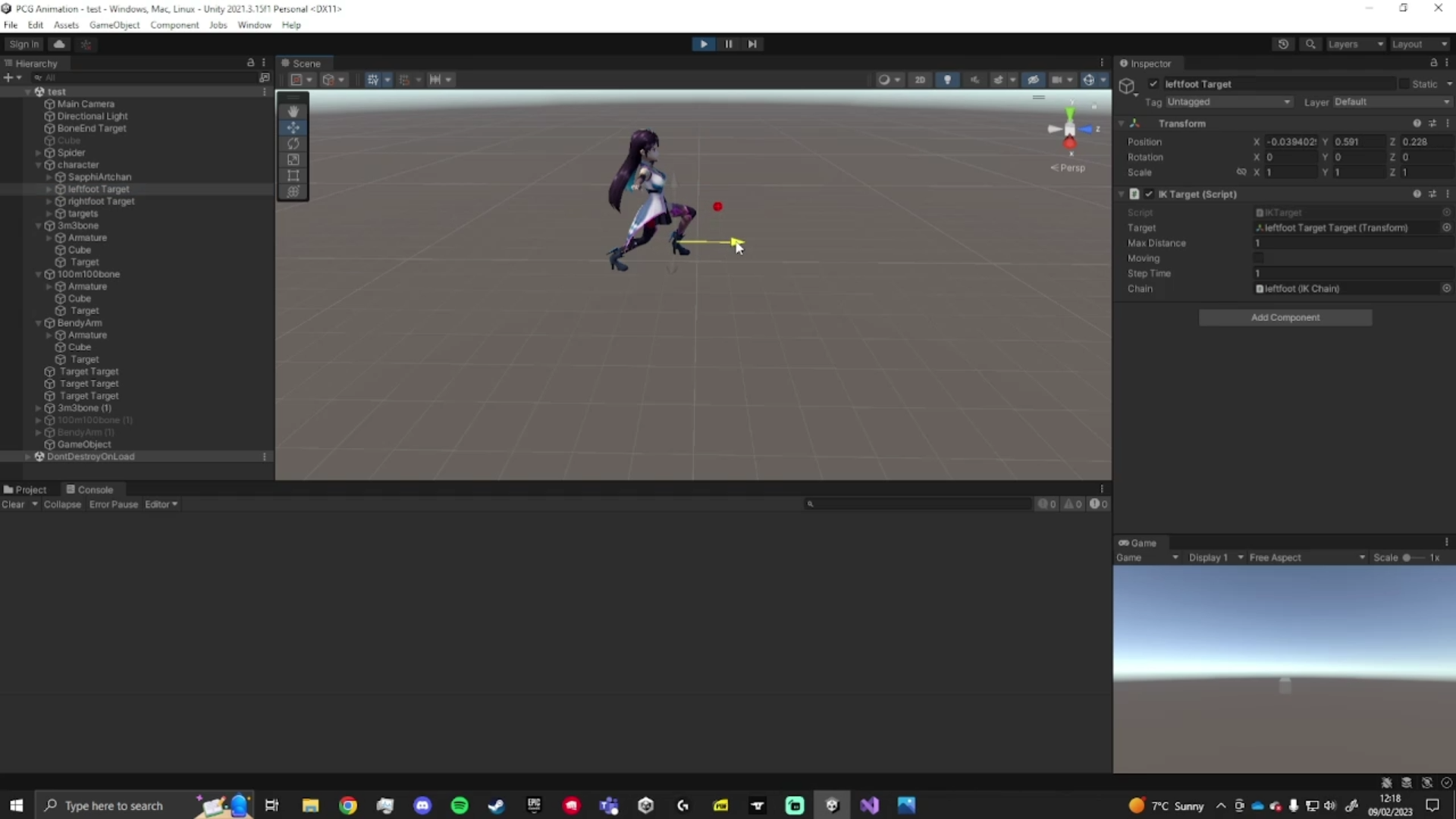
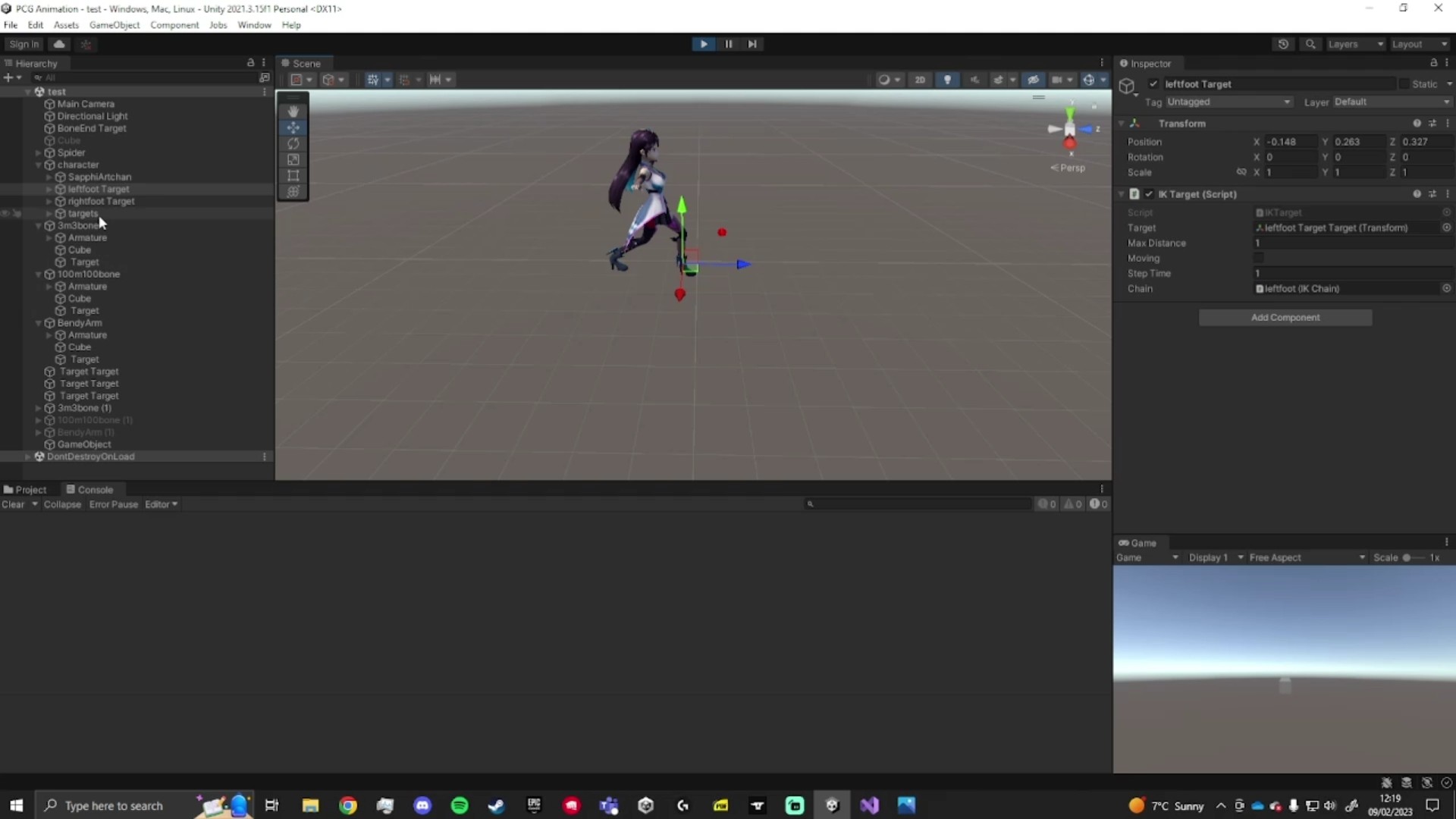
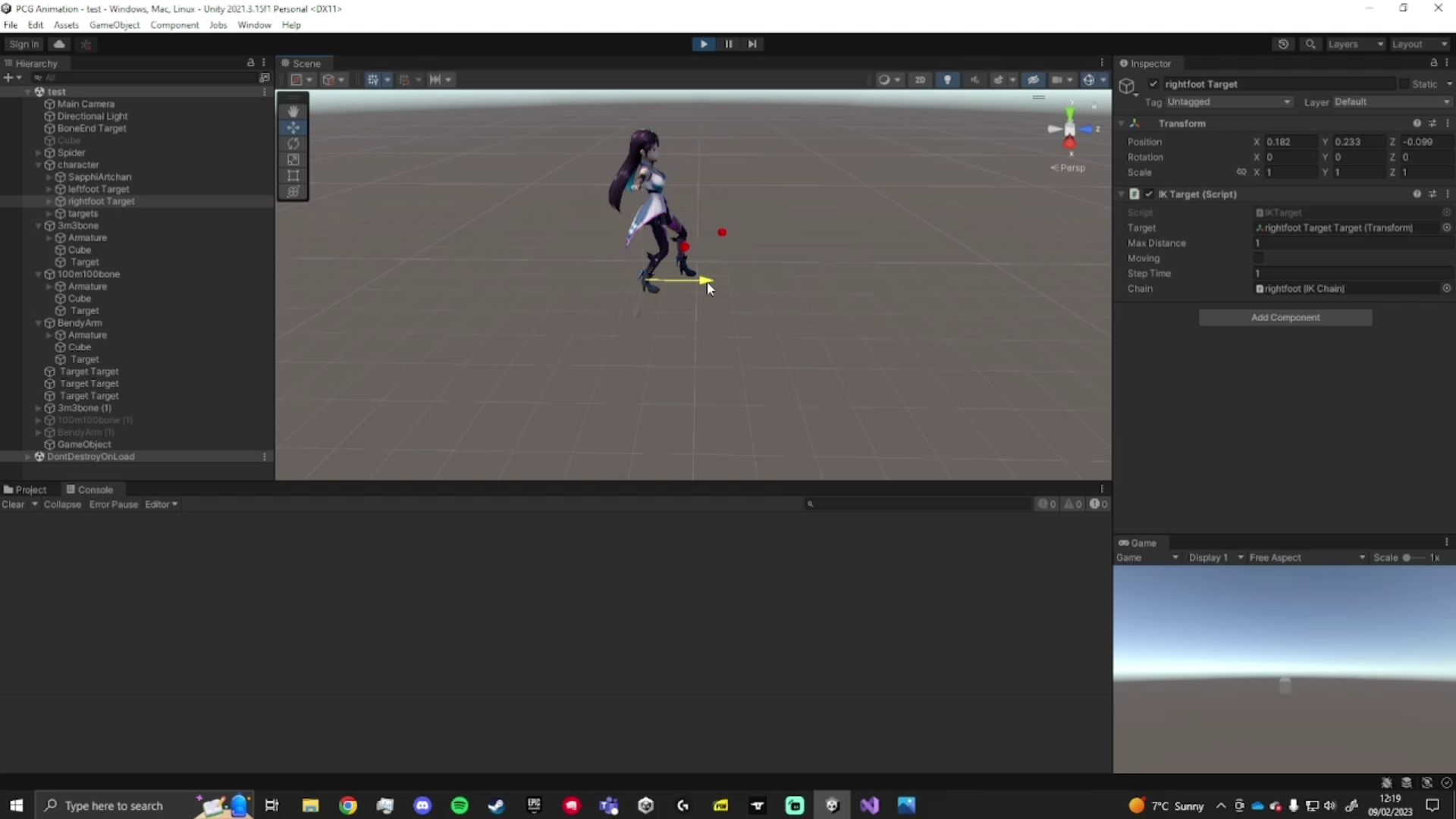
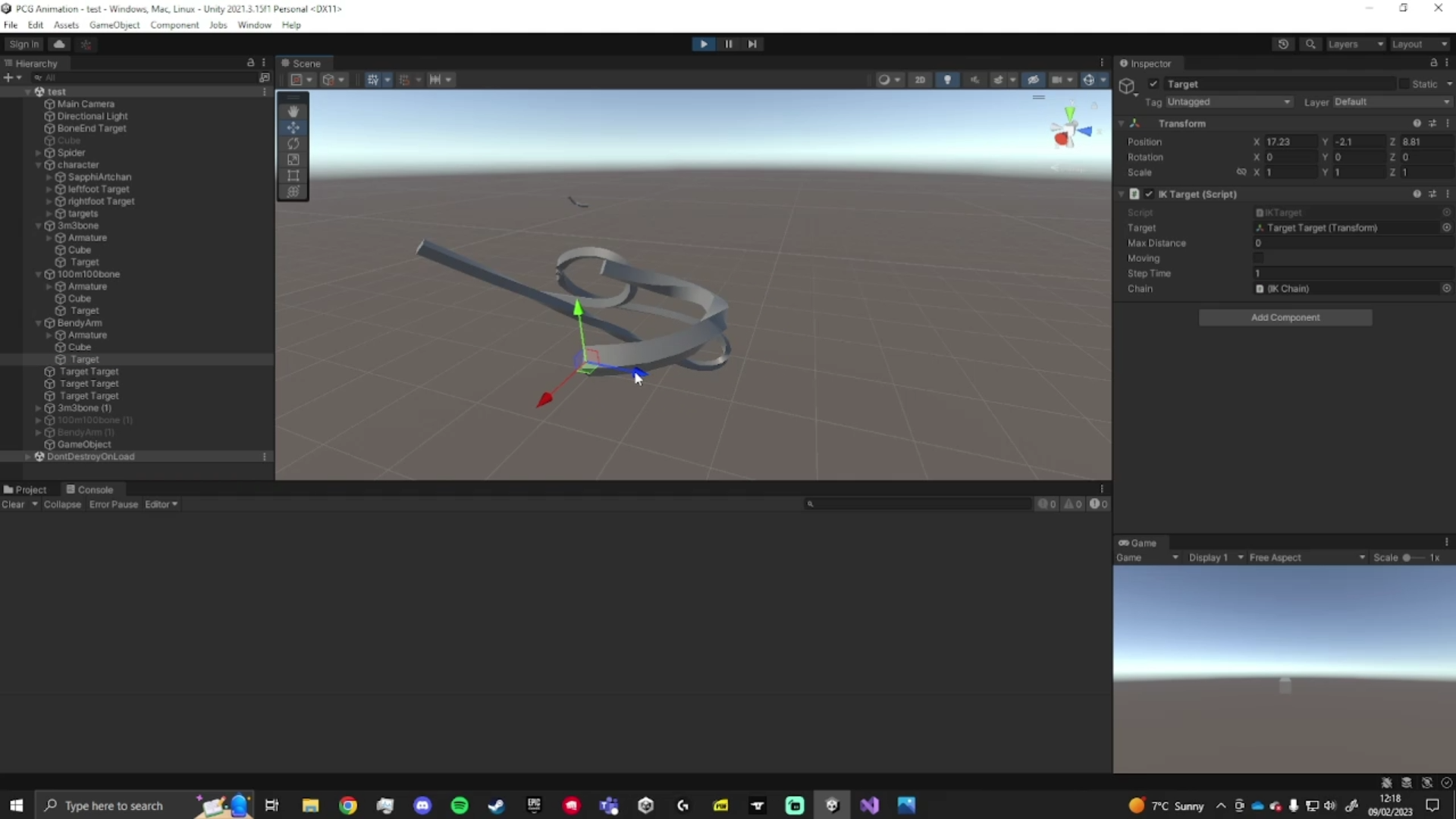
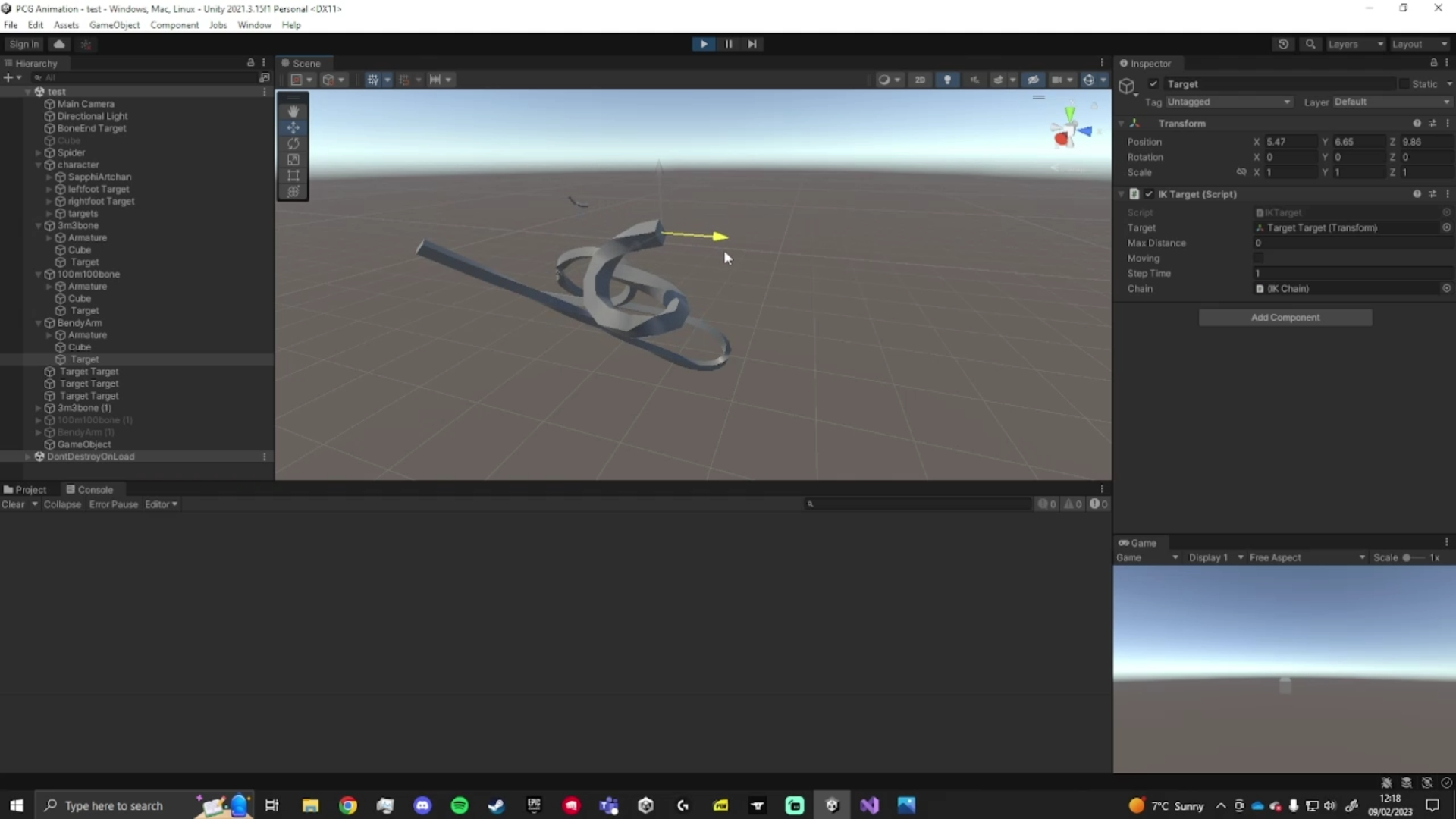
My entire masters degree was focused on procedural content generation, specifically procedurally generated ecosystems, and the first project involved in this was procedural animation. For this project I researched methods of procedurally generating animations to develop my own systems that allow for the procedural generation of creatures.
This was accomplished by making use of inverse kinematics. This is a technique often used in robotics to move the end point of an arm to a specific point by rotating each of the joints. I made use of this technique by applying inverse kinematics to each limb on the body to ensure that the end point of the leg would constantly be grounded. Each legs target would then be moved periodically to simulate a step. Combining this with a body and AI allowed me to create simple creatures that employed spider-like movement.